Washington DC Media Tour

Niko and McGill represented the team this past week in Washington DC, where they met with The Washington Post, Boot Camp radio, and the Wall Street Journal.
Niko and McGill represented the team this past week in Washington DC, where they met with The Washington Post, Boot Camp radio, and the Wall Street Journal.
Our team is happy to report that we took 2nd place overall in Penn Engineering this past Thursday at the All Engineering Senior Design Presentations. Thanks for all the support! Our new teaser video is below, and we should be receiving a link to our full presentation on YouTube soon!
Today, Team Titan presented our project at the Mechanical Engineering Senior Design Day. Attached to this post, you’ll find our poster with information, as well as our “teaser” video below.
We’re happy to report that our team was honored with the Judge’s Award for overall project excellence. We’ll be one of three teams representing that Mechanical Engineering Department at the All Engineering Senior Design presentations next week.

One way of creating a natural user experience is to give a quick, smooth response to the user input. This is no small feat; how can you tell when a user requires additional strength? Electromyography is a potential solution. Electromyography, or EMG, is a way of sensing muscle activity through electrical signals. When muscles are activated by the brain, an electrical potential can be measured in the range of 50uV to 30 mV. By amplifying and filtering the signals, it’s possible to read and decompose the signals. When the muscles are inactive, the electrical potential is low; however, when lifting an object, the electrical potential rises. As the work required of the human increases, more muscle is called on to help lift the object, increasing the potential even higher. Therefore, using the correct sensors and filtering, it’s possible to scale the amount of aid from an exoskeletal suit.
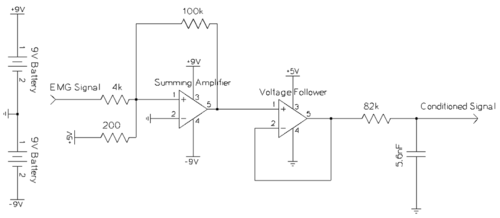
Figure 1: The circuit used for amplifying and filtering EMG sensor data.
One of the team members’ brothers, Steve McGill, worked on a project with EMG sensors a few years back for his senior design. We enlisted his help in developing a EMG solution and borrowed his circuit, still working after three years of inactivity (Fig. 1). The sensors he lent us were high quality collocated EMG pads (see Fig. 2). This setup was found to be a “binary” approach, capable of determining if there was any muscle activity or none at all. This result was exciting, especially so early on in our project, but not ideal. An ideal signal would clearly represent a gradient of muscle activity, delineating both small and large loads. Luckily, a little digging online led to some interesting circuits that we’ll be investigating soon!

Figure 2: Two EMG sensors. These were applied directly to the skin and attached with typical bandage wrap.
The transition from no assistance to assistance could be triggered with these EMG sensors, but it’s not clear yet how to stop the external support. For example, when lifting a heavy box, the assistance could be triggered once the EMG signal crosses a certain threshold. This would allow the user to lift the box in a continuous angular rotation. However, a trigger must be set at the desired arm angle to lock the user’s arm in place. Current systems use an external controller to actuate and stop the user’s motion; it would be ideal to encapsulate the system and localize control to the user.