Titan Arm
Month
After much machining, the suit has been put together!

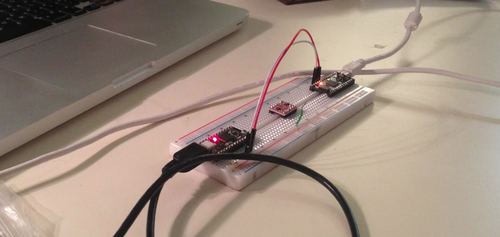
The break was spent developing serial communication code between the M2 and BeagleBone in Python and C. In addition, the power regulation circuit was implemented on breadboard and proved the DC-DC Buck Converter worked as intended – the voltage was very close to the target voltage of 5V.

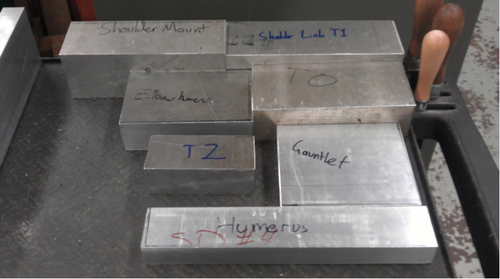
After many long, 14 hour-or-so days in the machine shop, the majority of our components have been manufactured.

The team has embarked on a spring break challenge: machining a large number of components for the exoskeleton and advancing the transmission and electronics subsystems.