Actuation System Selection
After months of deliberation, our team decided to purse an actuated upper body exoskeleton for use in the fields of healthcare, search and rescue, and strength intensive occupations.
Isolating simply the actuation subsystem, our team researched four different forms of actuation:
- Pneumatic air muscles – First developed in the 1950s as McKibben Artificial Muscles for use in artificial limbs. This form of actuation has a high strength to weight ratio (up to 400:1) and low cost ($16 for a 7kg pull muscle), though the movement would not be precise and the air lines are prone to air leakage.

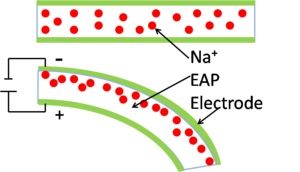
- Electroactive Polymers (EAPs) – This material deforms in shape when a voltage is applied to it. With up to a 1000:1 strength to weight ratio, these flexible actuators look like natural human muscle movement. However, this is relatively new technology that is difficult to obtain and unfamiliar to use.
- Hydraulics – Hydraulic systems are strong, precise, and fast. Mainly used in heavy duty machinery, these systems can be hard to obtain, especially for the small package needed for our project. The can also be messy an require heavy maintenance.
- DC Motors – Direct currents motors are precise, quiet, clean, and familiar to our team. Though they are simple to use, the amount of torque required by our system mandates that a large gear ratio would be necessary for use in the exoskeletal system.

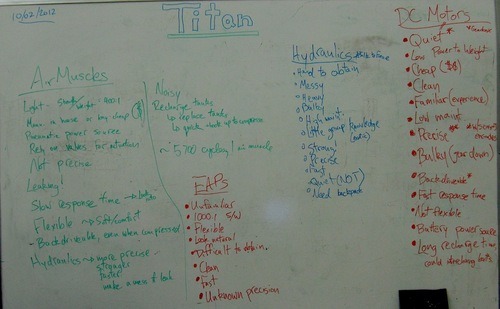
Fig. 1: Our whiteboard brainstorming session.
Our team has decided to move forward with a DC motor actuation system. This system was chosen because the team has experience; DC motors are already relatively inexpensive, clean, quiet, and precise.